



-
CKD技報は
10周年を
迎えました。CKD TECHNICAL JOURNAL
10TH ANNIVERSARY
この10年間で、私たちは多くの技術革新と新たな挑戦を共有してきました。これからも、技報を通じて皆様に最新の情報をお届けし続けていきたいと思います。引き続きご愛読とご支援をよろしくお願い申し上げます。
CKD TECHNICAL JOURNALCKD技報
TECHNICAL
JOURNAL
2025 Vol.11
鶏舎巡回における
自律走行技術の確立Establishment of Autonomous Driving Technology
for Poultry House Patrolling

-
- 長谷川 克紀Katsunori Hasegawa
- 新規事業開発室New Business Development Office
わが国の労働力人口は少子高齢化に伴い急速に減少しており、人手不足が大きな課題となっているが、その中でも鶏卵産業は後継者不足と新規就業者の減少も相まって中小規模農家の廃業が相次いでいる。
その一方で、食卓に欠かせない卵の需要は近年変わっておらず、この需要に応えるためには、鶏の品種改良や工程の自動化など、生産から出荷まで様々な技術革新を起こしてきた。
しかしながら、唯一ケージ内で死亡した鶏を発見することだけは人による鶏舎巡回作業のままとなっている。この作業は毎日行われ、作業員にとって大変な労力を伴う作業であり、自動化を望む声が強く上がっている。
寡占化とともに大規模化が進む鶏卵産業の課題に着目し、過酷な作業の負担軽減要求に応えるため、鶏舎を自動巡回する自律走行ロボットの開発に取り組んだ。
本稿では、自律走行技術の内容について紹介する。
The labor force in Japan is rapidly decreasing due to the declining birthrate and aging population, and labor shortage is a major issue. Among them, the egg industry is facing a shortage of successors and a decrease in the number of new workers,and small- and medium-sized farmers are closing down one after another.
On the other hand, the demand for eggs, which are indispensable to the table, has not changed in recent years. In order to meet this demand, various technological innovations from production to shipping have been introduced, such as breeding of chickens and automation of the process.
However, the only task to find dead chickens in the cage remains the patrol work by humans. This work is carried out every day, and it requires a lot of labor for the workers, and there is a strong demand for automation.
Focusing on the problem of the egg industry, which is growing in scale with the oligopoly, we have developed an autonomous traveling robot that can patrol the poultry house automatically to meet the demand for reducing the burden of the severe work.
This paper introduces the contents of the autonomous traveling technology.
1. はじめに
近年変わらない卵の需要に応えるため、寡占化とともに養鶏場の大規模化が進行することで、鶏の給餌や集卵、除糞、温度管理など自動化された鶏舎が増加してきた。それに伴い、1棟あたりの飼養羽数は数万羽が主流となっており、最近では十万羽を超える鶏舎も増加している。
しかしながら、唯一ケージ内で死亡した鶏を発見することだけは人による巡回作業のままとなっている。
この死亡鶏を放置するとケージ内に滞留した腐敗卵の混入や病気発生の原因となるリスクが生じるため、重要かつ毎日の必須作業であるが、足元から見上げる高さまで数段あるケージの中にいる数万羽の目視検査は作業員にとって非常に過酷な作業となっている。
この作業負担を軽減するため、鶏舎を自動巡回し死亡した鶏を発見する自律走行ロボット(以下、ロボットとする)の開発に取り組んだ。
次項から、鶏舎での自律走行における課題とその解決方法について紹介する。
2. 鶏舎環境について
日本では94.3%の採卵鶏*1)は、10羽ほどの鶏を収容できる小さなケージがY方向に直線的に設置され、Z方向に7~8段積み上げられ、バタリーケージと呼ばれる方式で飼育が行われている(Fig. 1)。
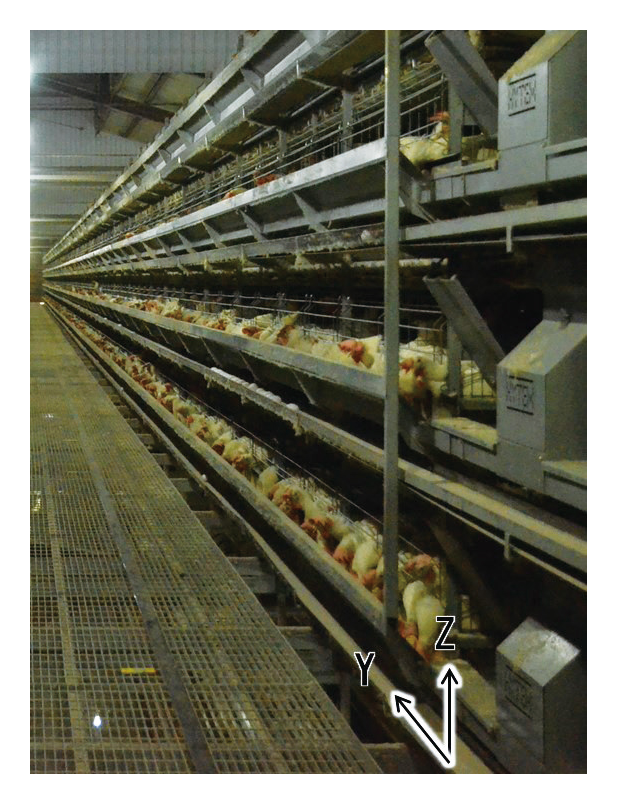 Fig. 1 バタリーケージ
Fig. 1 バタリーケージ
鶏舎内の照度は生産性と作業性を考慮して、5~10ルクス程度の薄暗い環境で管理する事例が多い*2)。
一般的な鶏舎内のレイアウトはX方向においてケージが背中合わせに配置され、等間隔で複数列にわたって並んでおり、1階と2階の間はグレーチングの床で仕切られている。
今回検証を行った鶏舎はFig. 2に示すようなレイアウトが一般的で2階建てになっており、上下階合わせてサッカーコート1面ほどの広さに6万羽ほど飼育されている。
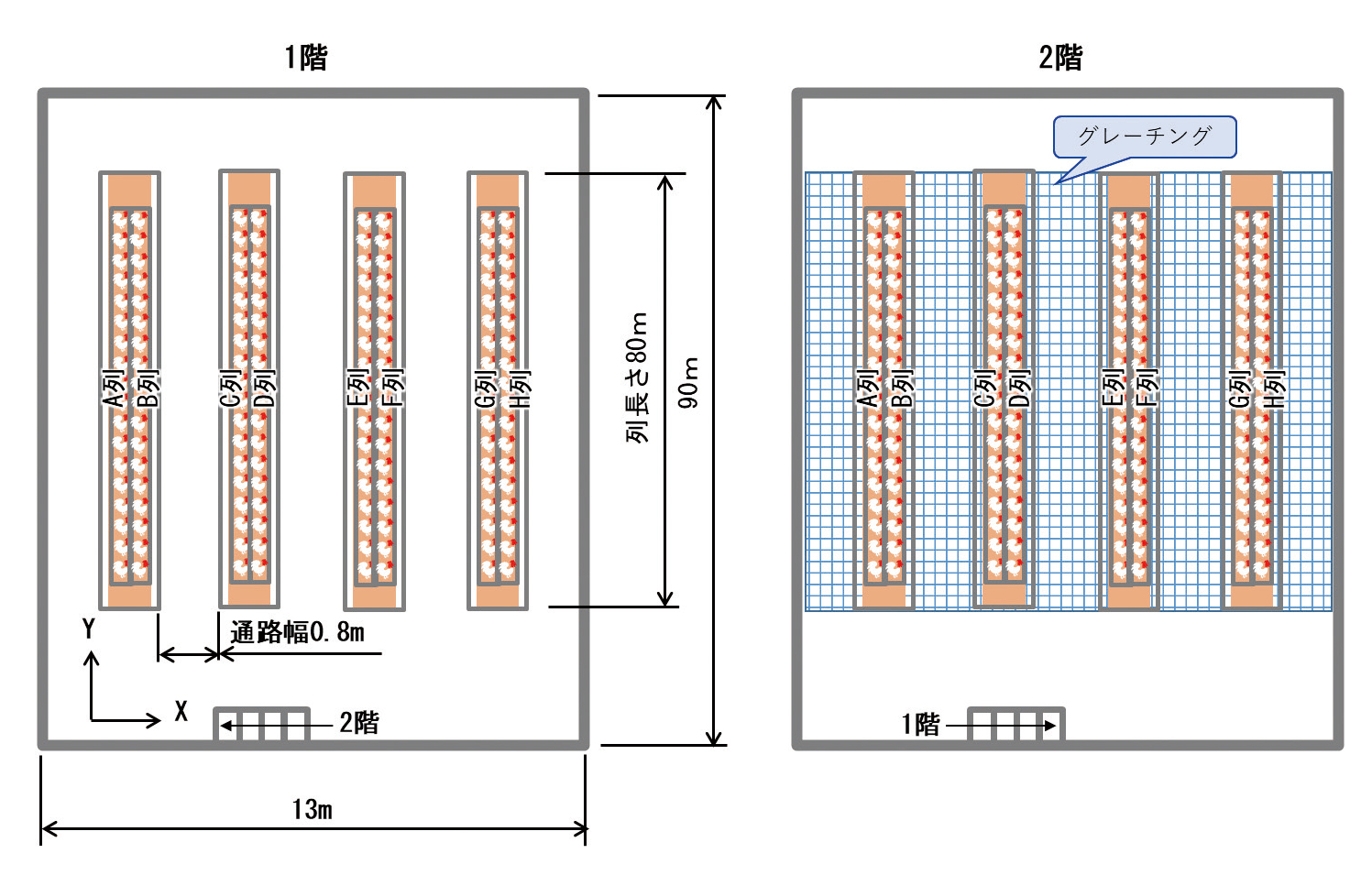 Fig. 2 検証先の鶏舎レイアウト
Fig. 2 検証先の鶏舎レイアウト
3. 走行方式の検討
GPSやみちびきなどの衛星測位システムが利用できない鶏舎内を自動巡回するには、Table 1に示すように大きく分けて2つの走行方式がある。
誘導走行方式は磁気テープなど誘導体に沿って走行し床面設置工事が必要で、広大な鶏舎への導入には多くの時間と費用が掛かる。
そこで、誘導体が不要で導入コストが安価な自律走行方式を選択することにした。
| 走行方式 | 誘導走行方式 | 自律走行方式 |
|---|---|---|
| 走行方法 | 床面に施工した磁気テープなどの誘導体に沿って走行 | 誘導体不要で搭載されたセンサで自己位置を認識しながら走行 |
| 移動範囲 | 誘導体上のみの固定ルート | 地図を元に自動でルート算出 |
| 障害物への対応 | 停止 | 回避または停止 |
| 本体コスト | 一般的に安価 | 一般的に高価 |
| 導入コスト | 誘導体の床面設置工事が必要で高価 | 環境地図作成のみで安価 |
| 搭載車両 | AGV (Automated Guided Vehicle) |
AMR (Autonomous Mobile Robot) |
4. 自律走行について
自律走行に欠かせない技術の一つが、S L A M(Simultaneous Localization and Mapping)であり、自動で床をきれいにしてくれるロボット掃除機や飲食店で人の代わりに料理を運ぶ配膳ロボットなど私たちの身近な製品にも搭載されている。
4-1 SLAMとは
前述したSLAMとは、自分が地図上のどこにいてどの方向を向いているのか推測する「自己位置推定(Localization)」と自分の周辺環境を把握して地図を作成する「環境地図作成(Mapping)」を同時に行う技術の総称であり、ロボット自身の状態を把握するための内界センサとロボット周囲の環境を把握するための外界センサを利用して自己位置推定する手法が現在の主流である。
4-2 SLAMの種類
SLAMは搭載する外界センサによって以下の3種類に分類される。
①カメラから取得した画像データで測定するVisual SLAM
②ToFセンサから取得した深度画像データで測定するDepth SLAM
③LiDARセンサから取得した点群データで測定するLiDAR SLAM
それぞれにメリットやデメリットがあり、用途や環境、予算に応じて選択する必要がある。
Visual SLAMは比較的安価のため導入コストを抑えるメリットがあるが、距離取得が苦手で薄暗い鶏舎には不向きである。LiDAR SLAMは高価ではあるが、Visual SLAMよりも遠距離での測距精度に優れており、暗闇であっても精度に影響がない。Depth SLAMも暗闇で使用できるが、LiDAR SLAMと比較すると近距離しか測定できず精度もあまり良くない。
以上のことから、薄暗い環境の鶏舎で高精度に走行するにはLiDAR SLAMが最適と判断し、実装することとした。
4-3 SLAMの実例
実際に9m×3mの凹形状の壁に囲まれた環境下で、ロボットを走行させて作成した環境地図をFig. 3に示す。黒色は壁や障害物などの物体が存在する箇所、白色は移動可能な箇所、灰色は未知領域として表示されている。
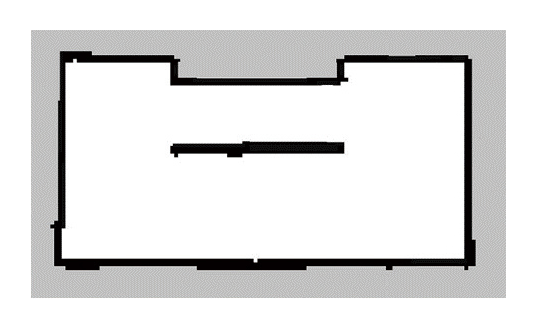 Fig. 3 環境地図
Fig. 3 環境地図
次にロボットの前後に取り付けたLiDARセンサの点群データをFig. 4に示す。
ロボット自体が赤色の四角枠で表示され、その前方および後方にLiDARセンサが取得した点群データが表示されている。色の違いは物体の反射強度を表し、赤・橙・黄・緑・青・藍・紫の順に反射強度が強い。
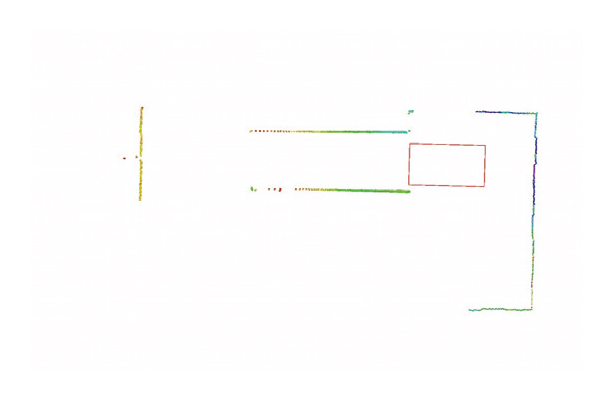 Fig. 4 点群データ
Fig. 4 点群データ
最後に環境地図とLiDARセンサの点群データを照合した結果をFig. 5に示す。
LiDARセンサの点群データと環境地図との特徴点を一致させて、自己位置推定が行われていることが確認できる。
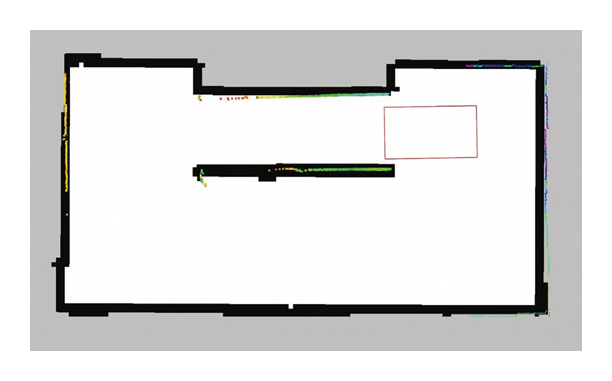 Fig. 5 点群データ
Fig. 5 点群データ
5. 実現における課題
一般的なAMRが走行する工場や倉庫と鶏舎では環境や用途が大きく異なり、SLAMの観点から見ると非常に難易度の高い環境となっている。次の2点の技術を確立することが課題となった。
5-1 鶏舎のケージ列走行
内界センサとしてロボットの左右車輪にモータ回転量が得られる回転センサが付いており、計測される回転量から移動量を計算するオドメトリと呼ばれる手法を用いて自己位置推定している。
この手法の課題に累積誤差があり、移動量計算における僅かな誤差が補正されることなく累積し、真の位置とずれていく現象が発生する。
短距離移動では問題にならない場合も多いが、長距離移動となる鶏舎では環境地図がうまく作成できずに自己位置推定できないことが懸念される。
この累積誤差を外界センサの情報で補正するのが一般的であるが、鶏舎のケージ列を走行する際には構造的に同じような風景が続くため補正することも困難である。
5-2 高精度な直進走行
死亡鶏を検知するためには、ロボットに搭載されたカメラで直進走行しながらケージを撮影し、AIによる画像分析で死亡鶏かどうかを判断する必要がある。
この画像分析には同じ構図で高精度な画像が不可欠であり、カメラとケージとの距離および左右の位置を常に一定に保ちながら走行しなければならない。
しかしながら自律走行では、アルゴリズムや計算量の制約から100mm程度のずれは定常的に発生し、それほど高い精度で直進走行することはできない。
6. 解決方法
この2つの課題を解決するために、ケージ列を走行する際に自律走行とは別の走行アルゴリズムに切り替えることとした。
ケージ列の前面に設けられた直線的に延びる給餌用レール(Fig. 6)に、LiDARセンサのレーザ光を照射してその反射光を受光することによって給餌用レールまでの距離を計測する。
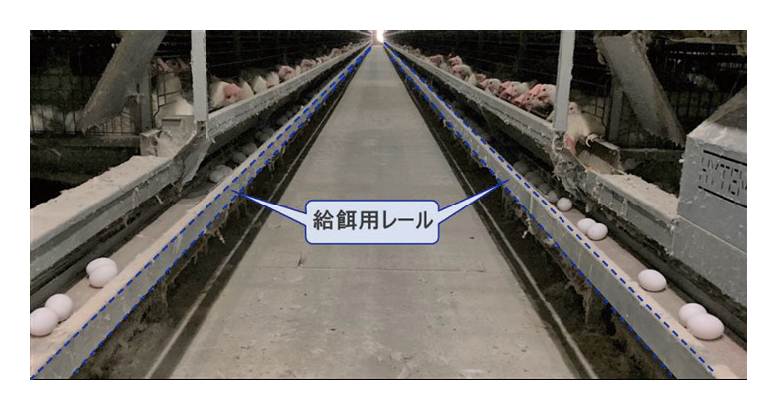 Fig. 6 給餌用レール
Fig. 6 給餌用レール
その計測結果に基づいて給餌用レールとの距離が一定になるように走行するアルゴリズムを用いることで、高精度な直進走行が実現し(Fig. 7)、オドメトリのみで給餌用レールに沿って走行することで環境地図作成も不要となる。
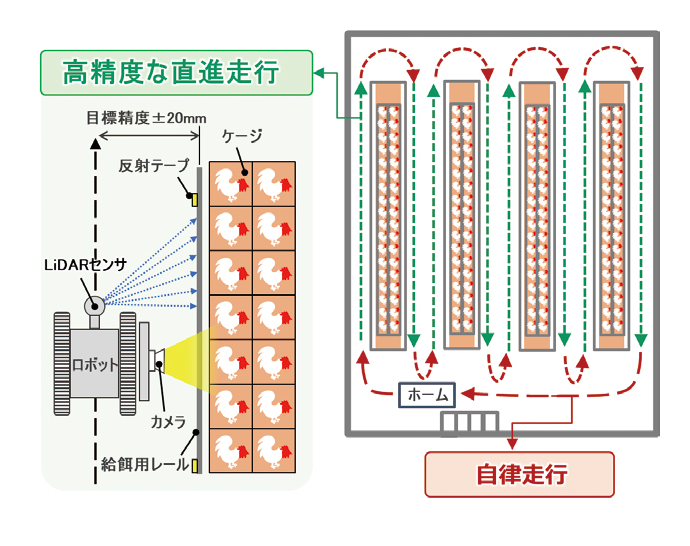 Fig. 7 高精度な直進走行
Fig. 7 高精度な直進走行
また、自己位置推定に用いるLiDARセンサを活用することで、新たにレーザ距離計など他機器を追加することなく安価に構築できる点や、既存設備環境を利用することでイニシャルコストが発生せず、短時間で導入することができることもメリットとなる。
オドメトリの累積誤差については、給餌用レールに一定間隔で貼り付けた反射強度が大きい反射テープを検出すると撮影タイミングと判定し各ケージの撮影と同時に位置補正をすることとした。
この給餌用レールに沿ってケージと一定距離を保ちながら走行し、ケージの撮影動作を行うアルゴリズムは当社独自の技術(特許第7368341号)である。
7. ロボットのイメージと構成
当社が「鶏舎内を自動巡回するロボット」、協業先が「画像と温度データによる死亡鶏のAI判定」を担い開発したロボットのイメージをFig. 8に、システム構成をFig. 9に示す。
ロボットは、悪路走破性の高いクローラ、周囲の状況を把握するLiDARセンサ、自律移動を制御するソフトウエアで構成される。
ロボットの側面にはケージ段分のカメラを備え、指定ルートを自動巡回してケージを撮影し、画像と温度データを管理用PCに転送、死亡鶏のAI判定を行い、場所を作業員のモバイル端末に通知する仕組みとなっている。
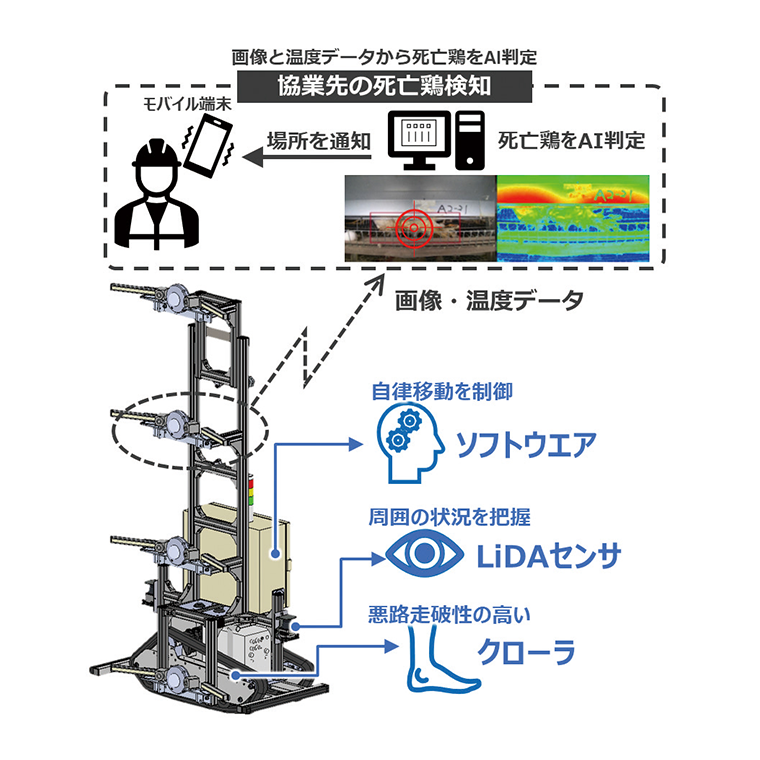 Fig. 8 ロボットのイメージ
Fig. 8 ロボットのイメージ
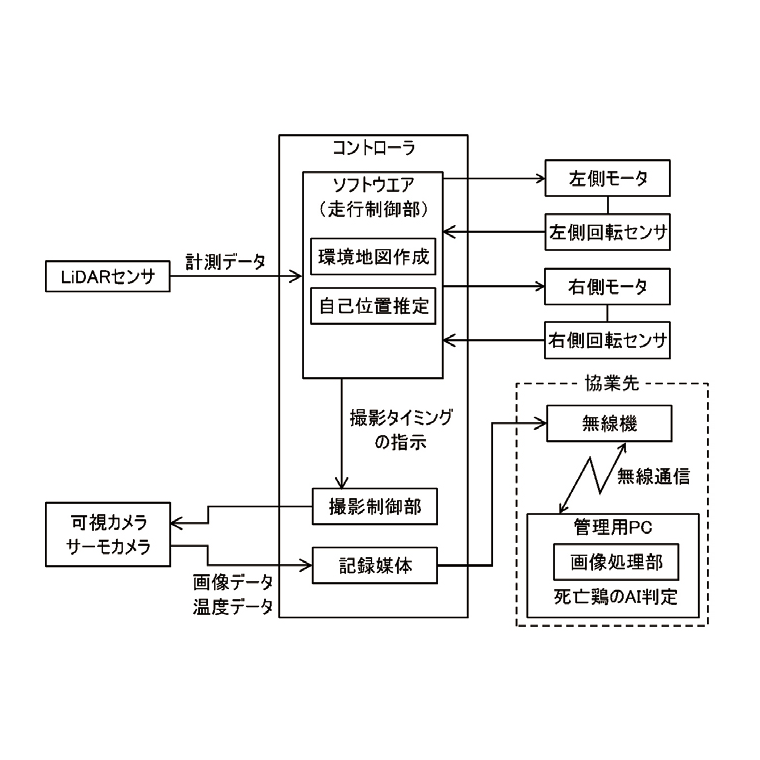 Fig. 9 システム構成
Fig. 9 システム構成
8. 成果と考察
給餌用レールに沿って走行するアルゴリズムで1km/hで走行させ、LiDARセンサと給餌用レールとの距離をレーザ距離計で計測した結果をFig. 10に示す。
5回計測した結果は目標精度±20mmを満足する範囲内に収まり、平均値(x)=481.4mm、標準偏差(σ)=2.70、工程能力指数(Cpk)=2.30と高精度な直進走行を実現させることができた。
また、鶏舎のケージ列走行についても、アルゴリズムを切り替えることで検証先の実鶏舎で全列問題なく走行し、1巡回50分程度で自動巡回できることが確認できた。
協業先の死亡鶏AI判定についても高精度な画像が撮影できたことで死亡鶏の検出率93%、誤検出率0.3%と高い検出精度が得られた。
今回の検証を通して1鶏舎6万羽を確認するために数時間を要していた巡回作業が、人の代わりにロボットが自動巡回することで、作業員は指定された死亡鶏通知があったケージに移動し取り除くのみとなり、作業時間が約1/5に低減されたことが実証できた。
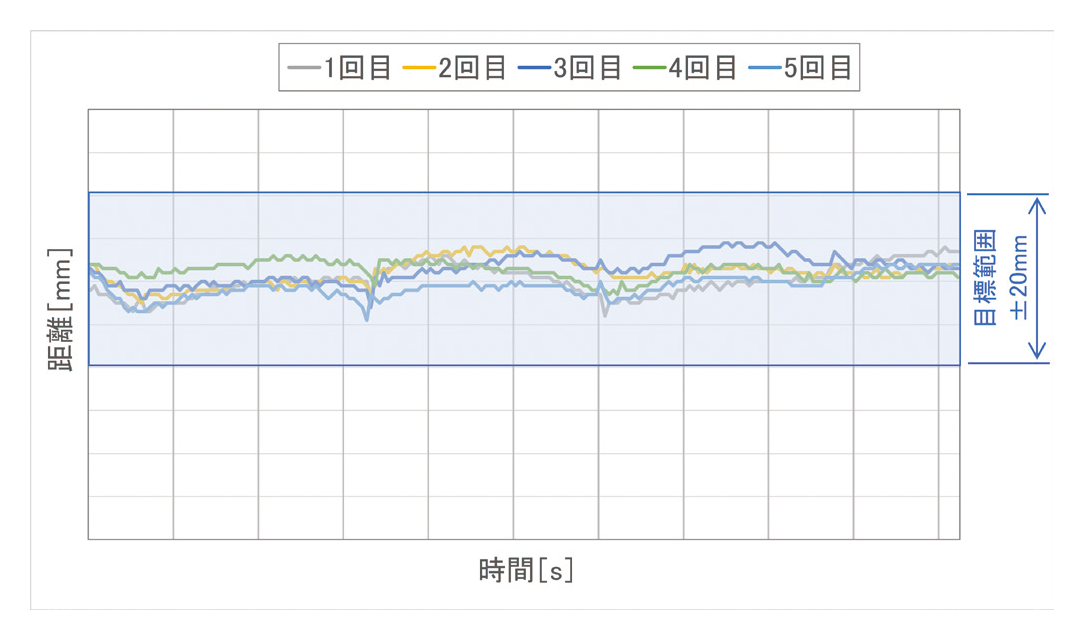 Fig. 10 直進走行結果
Fig. 10 直進走行結果
9. おわりに
本稿では、AMRが一般的に走行する工場や倉庫と異なる鶏舎環境での自律走行の問題点を述べ、独自のアルゴリズムでの解決方法を紹介した。
当社では新しい分野への挑戦を続けており、単なる省人化ではなく、過酷な作業負担の低減により作業員の健康を守ることで働き方改革を推進し、鶏卵産業の持続可能な発展に貢献したいと考えている。
*1)国際鶏卵委員会「ケージ飼いの割合」(2021) *2)静岡県経済産業部「LED を利用した鶏舎内照明技術」(2014) 出願特許 巡回自律走行ロボット 特許第7368341号(特開2022-89605)
2025 CKD Corporation 無断転載禁止 記事一覧へ戻る