●
选定方法与水平设置时相同。详细请确认样本的机种选定页面。
●
选定方法与水平设置时相同。详细请确认样本的机种选定页。
●
计算间隔时间时,请在加减速时间、定速时间内将调整时间相加0.2秒以上,进行计算。
●
滚珠丝杠相当于JIS标准(JIS B 1192-1997)中规定的精度等級“C7”。
●
上下左右任何偏移方向均为同一容许值。
●
EBS/EBR系列的本体材料是铝合金,而本体内导轨的钢球接触部分是钢。
●
EBR系列的活塞杆部的表面处理采用阳极氧化处理。
●
EBR系列的滑块部主要部的材质为钢。
●
EBS系列钢带的材是为不锈钢。
●
可以的。但是,仅限电源使用DC48V的情况下。
●
传感器电缆不是机器人电缆,而是标准电缆。
●
使用的润滑脂采用的是YAMABALA制AFEP2润滑脂(尿素)。
●
标准寿命为5,000km。
●
标准寿命为20,000km。但,04和05尺寸为10,000km。
●
滚珠丝杠相当于JIS标准(JIS B 1192-1997)中规定的精度等級“C8”。
●
EKS系列的本体材质为钢。
●
EKS系列的滑块部主要部的材质为钢,滑块部的罩盖为ABS树脂。
●
EKS系列钢带的材是为不锈钢。
●
没有附带传感器电缆。传感器前面有插座,可以把电缆焊接在一起,请客户将准备好的电缆焊接后使用。或者,如果准备了OMRON公司的传感器电缆,只要插入端子就可以使用。请确认商品样本技术资料的"原点传感器,限位传感器"之后,选定传感器型号。
●
样本的技术资料中的"原点传感器,限位传感器"项目中,有记载标准采用的NPN型的型号。变更为PNP型时,请准备好OMRON公司的同一系列的PNP型。
●
采用THK制AFF润滑脂。
●
电源从24V变更为48V时,会增加可对应的加减速度,并最高速度也会上升。详细请确认,样本技术资料的"速度/加减点速度的可移动质量表"中,DC48V,DC24V时的加减速度。
●
润滑脂注油口在滑块的左右两侧。
●
与低压指令会产生冲突的是,电源范围在DC75~1500V内。
●
DC24V和DC48V,相同使用条件下消耗电流相同。详细请确认ECR的规格。
●
ECR系列可对应NPN和PNP类型。
●
在教示模式下可改写的次数为100万次,是控制器基盘记忆用IC芯片的规格值。
●
控制电源,动力电源的规格因为不依赖接口规格,DC48V的时候IO-Link也能使用。
●
点区域设置范围基本,可以在行程范围内设置。
●
专用软件“S-Tools”支持Windows®7 SP1,Windows®8.1,Windows®10各自的32bit、64bit。如果Windows10的64bit没有反应时,请确认微软.NET Framework的版本是不是4.7.1以前。如果NET Framework的版本即使在4.7.1以上也没有反应的话,是有故障的可能性,请联系附近的营业所。
●
如果您想在暂停输入中减速停止,则会采用在此之前设定的条件值。
●
速度波形的采样时间是,能够变更取得速度波形数据的时间间隔的功能。
●
FLSH系列的公称寿命为500万次。
●
FLCR系列的公称寿命为500万次或1000km。
●
FGRC系列的公称寿命为500万次。
●
连接器盒是由树脂制成的,从强度的观点看,不能设置安装孔。请用电缆夹固定电缆部分。
●
该机种不可分解,所以不对应零件。
●
从本体出来的动力电缆和控制电缆两条都是标准电缆。
●
因为连接口袋上没有贴上铭牌等,所以请客户安装标识。
●
卡爪的开侧和闭侧最大把持力是不变的。目录规格中记载的“单边”的数值将应用于双方。
●
FLSH系列的滑动螺丝,螺丝侧(滑动螺丝母)为铜,螺丝侧(滑动螺丝母)为不锈钢。
●
反复精度和反复定位精度各有不同的概念。区别如下。
反复精度:把持工件时的中心精度
反复定位精度:反复定位在同一位置时卡爪的位置会有少许偏差
反复精度:把持工件时的中心精度
反复定位精度:反复定位在同一位置时卡爪的位置会有少许偏差
●
反复精度是把持工件时的中心精度。因为根据把持动作接近空转消除位置偏差,从而位置精度变得好。
●
定位销的中心精度为±0.2mm以下。
●
对于特殊的孔指定订单,由于卡爪座已经过热处理,无法进行其他加工,因此无法制造。
●
不对应橡胶盖。
●
反复精度不一样的原因是,内部构造的不同引起的。
●
因为FLCR系列和LCR系列的机器部分是通用的,静态容许力矩是同等的。
●
除了内部结构的差异外,FLCR系列还配备了马达,因此FLCR系列更重。
●
扭矩不对应。如果施加的负载超过最大扭矩,则可能会造成损坏。
●
关于分度精度的计算请到附近的营业所咨询。
●
基准面的位置,EBR系列活塞杆为正面,左侧和底面。
EBS系列马达作为反面,左侧和底面。
详细请确认样本的外形尺寸图。
EBS系列马达作为反面,左侧和底面。
详细请确认样本的外形尺寸图。
●
型号中选择带传感器是,将在产品上安装外部安装的传感器。执行器左右两侧有传感器凹槽,可以将其安装在左侧或右侧的任意位置。
●
EKS系列的基准面为底面。
●
型号中选择带传感器是,产品会附加外部安装的传感器。执行器外侧有传感器用槽,请安装到任意位置进行调整。
●
型号中选择带传感器是,将在产品上安装外部安装的传感器。执行器左右两侧有传感器凹槽,可以将其安装在左侧或右侧的任意位置。
●
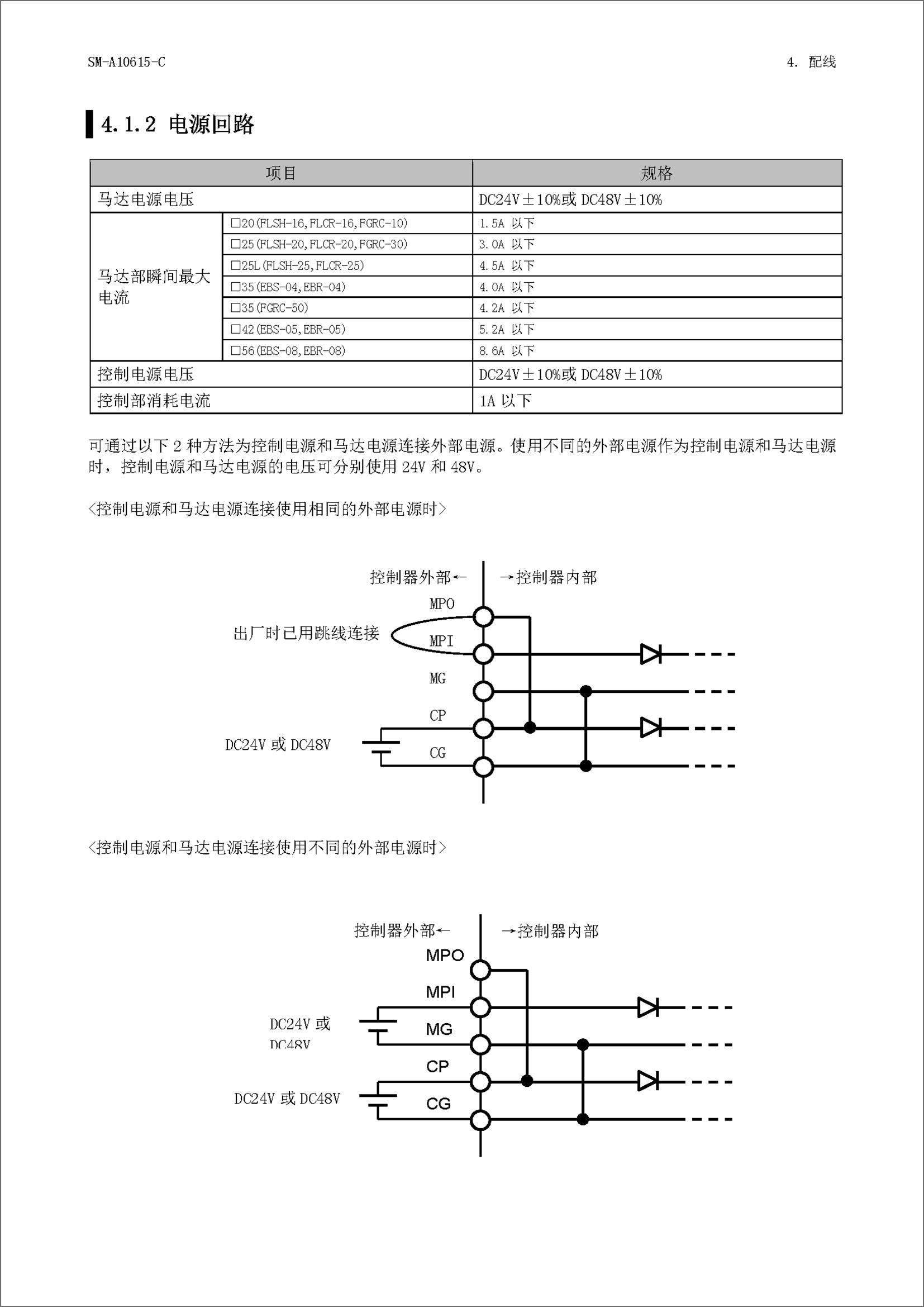
分离控制电源和动力电源的方法是,把MPO和MPI的跳线拆开,然后把DC24V或48V连接到MPI和MG。
请查看说明手册中的以下页面。
请查看说明手册中的以下页面。
●
散热空间考虑自然对流,请确保表面和下表面都50mm以上的空间。
●
如果关于控制器的邻接设置,请遵守目录的"使用上的注意事项"使用则没有问题。
●
作为接地线的替代停止实体的螺丝成为接地处理。如果是DIN轨道选项,请使用DIN轨道的孔进行接地处理。
●
如果想写入商品样本以上的数值,根据自动识别变得不能写入。但是,因为无法辨别滚珠丝杠的导程,所以可以写入该型号的最大数值。如果在实际导程规格之上的话,会有警报声警告。
●
PZONE在选择了点数据时发挥作用,在设定该点的范围内输出。ZONE不依赖点数据,也发挥作用。
●
警告功能的累计使用时间是,成为伺服ON期间的时间的累计数。
●
能显示位置数据位置,但通常不会显示可写位置数据区域。输入可设定范围以外的数值时显示错误消息,此时也会显示可设定范围。
●
抽屉电缆的允许弯曲半径,推荐在弯曲半径40mm以上使用。
●
不建议将电流值限制在30%或以下,因为电流值由于内部机械机构的滑动阻力而不稳定。
●
返回原点时,不能选择“快捷方式”。这是因为FGRC系列使用增量编码器,并且在打开电源时不知当前的位置,所以无法做出捷径判断。
●
可以的。选定方法与水平设置时相同。详细情况请确认商品样本的选定页面。
●
因为是不可分解的产品,所以不支持零件。 不好意思,需要整个产品交换。
●
●
选定方法与水平设置时相同。详细请确认样本的机种选定页面。
●
选定方法与水平设置时相同。详细请确认样本的机种选定页面。
●
计算间隔时间时,请在加减速时间、定速时间内将调整时间相加0.2秒以上,进行计算。
●
滚珠丝杠相当于JIS标准(JIS B 1192-1997)中规定的精度等級“C7”。
●
上下左右任何偏移方向均为同一容许值。
●
EBS/EBR系列的本体材料是铝合金,而本体内导轨的钢球接触部分是钢。
●
EBR系列的活塞杆部的表面处理采用阳极氧化处理。
●
EBR系列的滑块部主要部的材质为钢。
●
EBS系列钢带的材是为不锈钢。
●
可以的。但是,仅限电源使用DC48V的情况下。
●
传感器电缆不是机器人电缆,而是标准电缆。
●
使用的润滑脂采用的是YAMABALA制AFEP2润滑脂(尿素)。
●
标准寿命为5,000km。
●
标准寿命为20,000km。但,04和05尺寸为10,000km。
●
滚珠丝杠相当于JIS标准(JIS B 1192-1997)中规定的精度等級“C8”。
●
EKS系列的本体材质为钢。
●
EKS系列的滑块部主要部的材质为钢,滑块部的罩盖为ABS树脂。
●
EKS系列钢带的材是为不锈钢。
●
没有附带传感器电缆。传感器前面有插座,可以把电缆焊接在一起,请客户将准备好的电缆焊接后使用。或者,如果准备了OMRON公司的传感器电缆,只要插入端子就可以使用。请确认商品样本技术资料的"原点传感器,限位传感器"之后,选定传感器型号。
●
样本的技术资料中的"原点传感器,限位传感器"项目中,有记载标准采用的NPN型的型号。变更为PNP型时,请准备好OMRON公司的同一系列的PNP型。
●
采用THK制AFF润滑脂。
●
电源从24V变更为48V时,会增加可对应的加减速度,并最高速度也会上升。详细请确认,样本技术资料的"速度/加减点速度的可移动质量表"中,DC48V,DC24V时的加减速度。
●
润滑脂注油口在滑块的左右两侧。
●
与低压指令会产生冲突的是,电源范围在DC75~1500V内。
●
DC24V和DC48V,相同使用条件下消耗电流相同。详细请确认ECR的规格。
●
ECR系列可对应NPN和PNP类型。
●
在教示模式下可改写的次数为100万次,是控制器基盘记忆用IC芯片的规格值。
●
控制电源,动力电源的规格因为不依赖接口规格,DC48V的时候IO-Link也能使用。
●
点区域设置范围基本,可以在行程范围内设置。
●
专用软件“S-Tools”支持Windows®7 SP1,Windows®8.1,Windows®10各自的32bit、64bit。如果Windows10的64bit没有反应时,请确认微软.NET Framework的版本是不是4.7.1以前。如果NET Framework的版本即使在4.7.1以上也没有反应的话,是有故障的可能性,请联系附近的营业所。
●
如果您想在暂停输入中减速停止,则会采用在此之前设定的条件值。
●
速度波形的采样时间是,能够变更取得速度波形数据的时间间隔的功能。
●
FLSH系列的公称寿命为500万次。
●
FLCR系列的公称寿命为500万次或1000km。
●
FGRC系列的公称寿命为500万次。
●
连接器盒是由树脂制成的,从强度的观点看,不能设置安装孔。请用电缆夹固定电缆部分。
●
该机种不可分解,所以不对应零件。
●
从本体出来的动力电缆和控制电缆两条都是标准电缆。
●
因为连接口袋上没有贴上铭牌等,所以请客户安装标识。
●
卡爪的开侧和闭侧最大把持力是不变的。目录规格中记载的“单边”的数值将应用于双方。
●
FLSH系列的滑动螺丝,螺丝侧(滑动螺丝母)为铜,螺丝侧(滑动螺丝母)为不锈钢。
●
反复精度和反复定位精度各有不同的概念。区别如下。
反复精度:把持工件时的中心精度
反复定位精度:反复定位在同一位置时卡爪的位置会有少许偏差
反复精度:把持工件时的中心精度
反复定位精度:反复定位在同一位置时卡爪的位置会有少许偏差
●
反复精度是把持工件时的中心精度。因为根据把持动作接近空转消除位置偏差,从而位置精度变得好。
●
定位销的中心精度为±0.2mm以下。
●
对于特殊的孔指定订单,由于卡爪座已经过热处理,无法进行其他加工,因此无法制造。
●
不对应橡胶盖。
●
反复精度不一样的原因是,内部构造的不同引起的。
●
因为FLCR系列和LCR系列的机器部分是通用的,静态容许力矩是同等的。
●
除了内部结构的差异外,FLCR系列还配备了马达,因此FLCR系列更重。
●
扭矩不对应。如果施加的负载超过最大扭矩,则可能会造成损坏。
●
关于分度精度的计算请到附近的营业所咨询。
●
●
基准面的位置,EBR系列活塞杆为正面,左侧和底面。EBS系列马达作为反面,左侧和底面。详细请确认样本的外形尺寸图。
●
型号中选择带传感器是,将在产品上安装外部安装的传感器。执行器左右两侧有传感器凹槽,可以将其安装在左侧或右侧的任意位置。
●
EKS系列的基准面为底面。
●
型号中选择带传感器是,产品会附加外部安装的传感器。执行器外侧有传感器用槽,请安装到任意位置进行调整。
●
型号中选择带传感器是,将在产品上安装外部安装的传感器。执行器左右两侧有传感器凹槽,可以将其安装在左侧或右侧的任意位置。
●
分离控制电源和动力电源的方法是,把MPO和MPI的跳线拆开,然后把DC24V或48V连接到MPI和MG。
请查看说明手册中的以下页面。
请查看说明手册中的以下页面。
●
散热空间考虑自然对流,请确保表面和下表面都50mm以上的空间。
●
如果关于控制器的邻接设置,请遵守目录的"使用上的注意事项"使用则没有问题。
●
作为接地线的替代停止实体的螺丝成为接地处理。如果是DIN轨道选项,请使用DIN轨道的孔进行接地处理。
●
如果想写入商品样本以上的数值,根据自动识别变得不能写入。但是,因为无法辨别滚珠丝杠的导程,所以可以写入该型号的最大数值。如果在实际导程规格之上的话,会有警报声警告。
●
PZONE在选择了点数据时发挥作用,在设定该点的范围内输出。ZONE不依赖点数据,也发挥作用。
●
警告功能的累计使用时间是,成为伺服ON期间的时间的累计数。
●
能显示位置数据位置,但通常不会显示可写位置数据区域。输入可设定范围以外的数值时显示错误消息,此时也会显示可设定范围。
●
抽屉电缆的允许弯曲半径,推荐在弯曲半径40mm以上使用。
●
不建议将电流值限制在30%或以下,因为电流值由于内部机械机构的滑动阻力而不稳定。
●
返回原点时,不能选择“快捷方式”。这是因为FGRC系列使用增量编码器,并且在打开电源时不知当前的位置,所以无法做出捷径判断。
●
可以的。选定方法与水平设置时相同。详细情况请确认商品样本的选定页面。
●
因为是不可分解的产品,所以不支持零件。不好意思,需要整个产品交换。