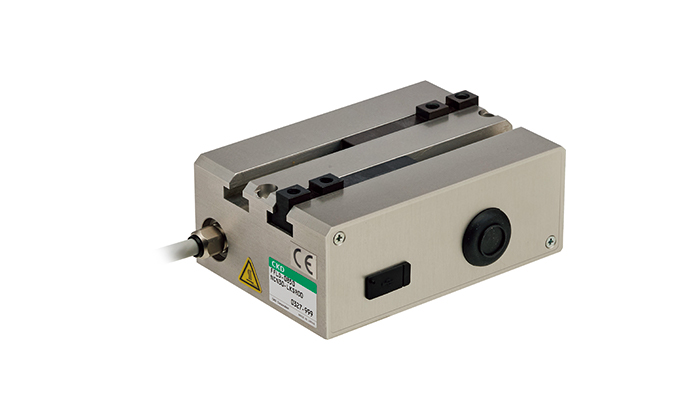
电动卡爪FFLD系列
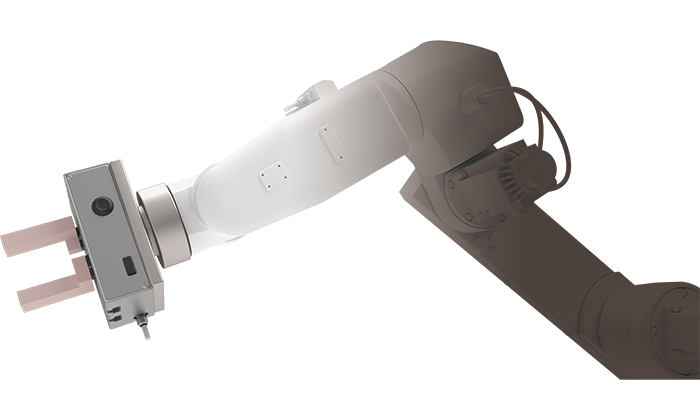
适用于机器人前端的电动卡爪!
因为电动卡爪以小型为主,所以重型工件很多都在使用气动卡爪进行搬运。
FFLD系列具备高夹持力、长行程,适用于机器人前端。
因上述问题而烦恼的话
-
- 问题 01
- 因为电动卡爪以小型为主,所以重型工件很多都在使用气动卡爪进行搬运。
-
- 问题 02
- 由于存在断线风险,希望可以减少机器人外部的配线。
如果选择电动卡爪FFLD系列…
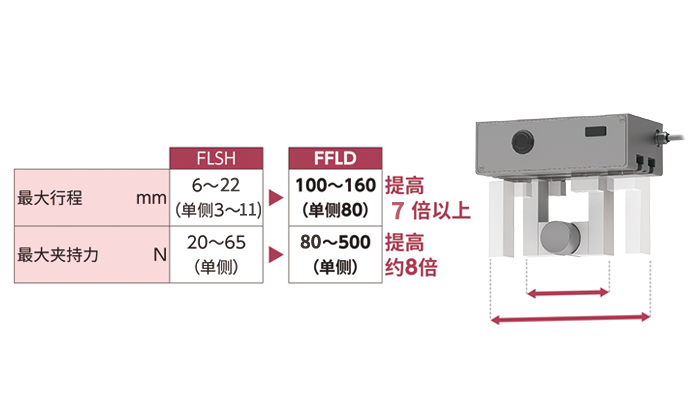
可夹持5㎏左右的工件!*
FFLD系列实现了夹持力500N(单侧)、160mm(单侧80mm)的长行程。
可实现单个夹爪搬送多品种工件。
*对应急加速搬送系数时的参考值。
可实现单个夹爪搬送多品种工件。
*对应急加速搬送系数时的参考值。
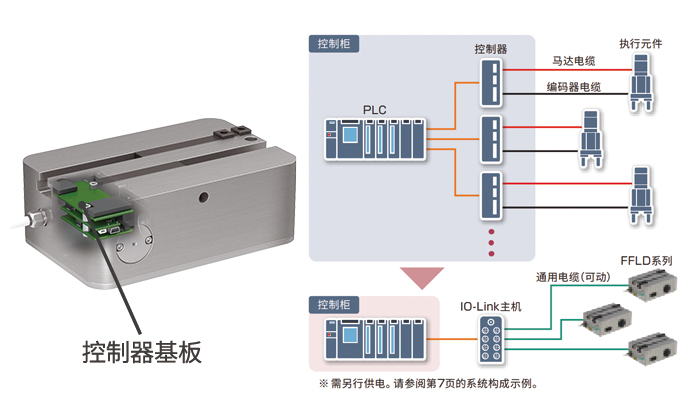
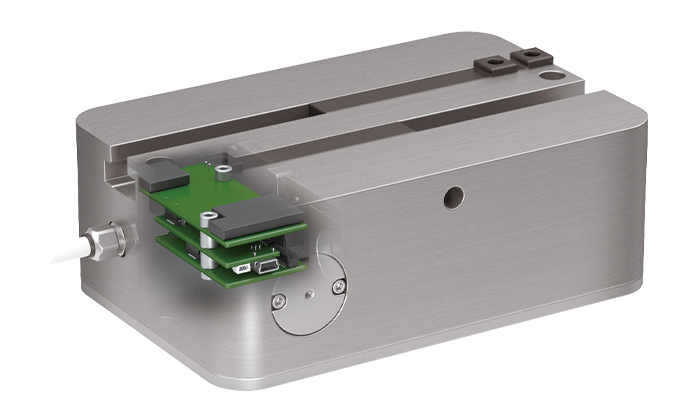
内置控制器降低断线风险!
通过内置控制器、IO-Link规格实现了动力及控制电缆的省配线化。
有助于降低机器人前端使用时的断线风险及简化配线。
有助于降低机器人前端使用时的断线风险及简化配线。
了解更多信息
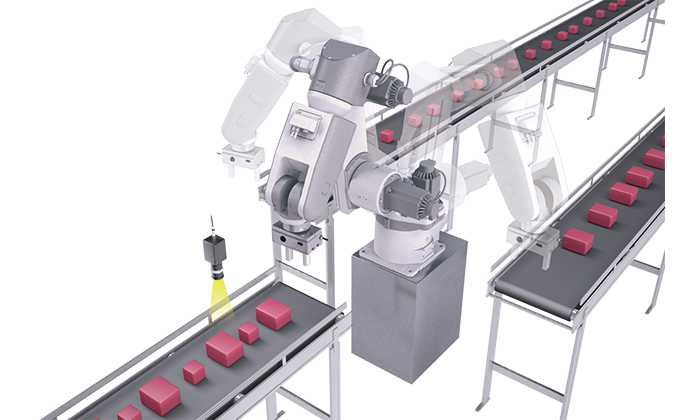
用途示例
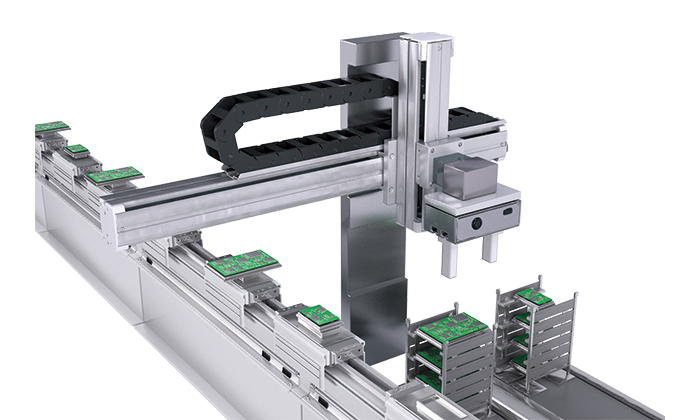
多关节机器人的前端
FFLD系列为薄型本体,可降低机器人前端的惯性力矩。
减轻机器人的负担,有助于机器人小型化、性能提高及长寿命化。
减轻机器人的负担,有助于机器人小型化、性能提高及长寿命化。
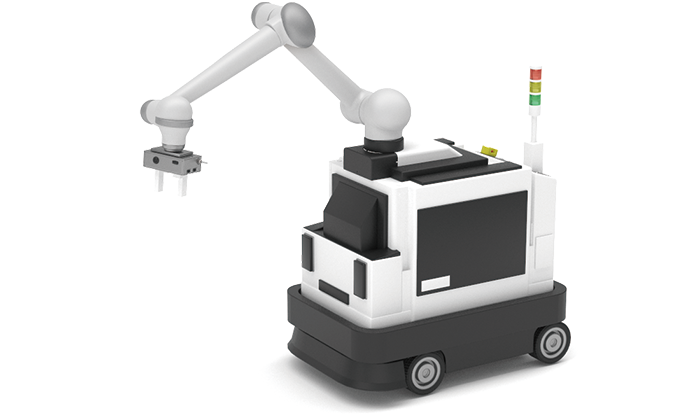
移动式机器人的前端
内置控制器,无需控制箱。
可通过IO-Link系统灵活变换位置和速度。
可通过IO-Link系统灵活变换位置和速度。
柔性搬送
可通过控制马达的电流值的推压动作调整夹持力。
夹持后可继续控制马达电流值,实现长时间稳定动作。
夹持后可继续控制马达电流值,实现长时间稳定动作。
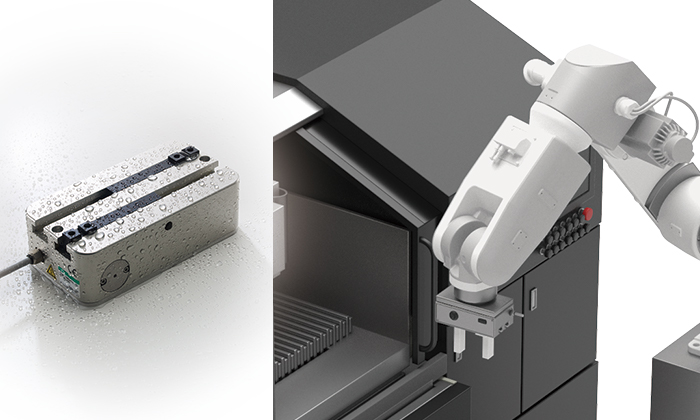
机床周边
可定制。
采用IP54规格,提高耐环境性。
也可在加工机周边使用。
采用IP54规格,提高耐环境性。
也可在加工机周边使用。
咨询 CONTACT
×

×
电动卡爪FFLD系列
×