夹持(多关节机械手前端)
/ FFLD
需求・问题Request
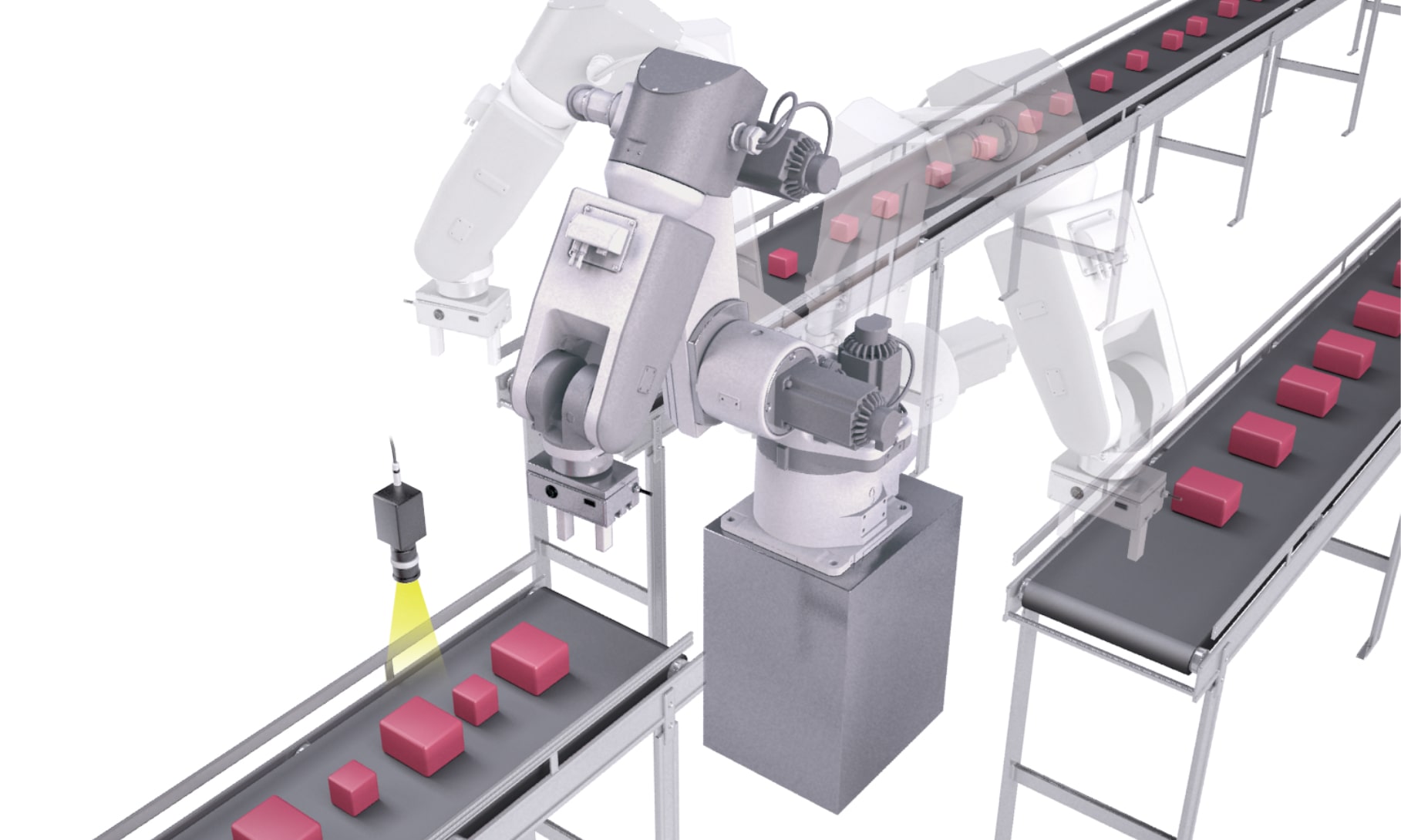
考虑到装置空间和成本,采用小型机器人,因此在其前端所配备的电动卡爪也需要尽可能低惯性的卡爪。
建议Suggestion
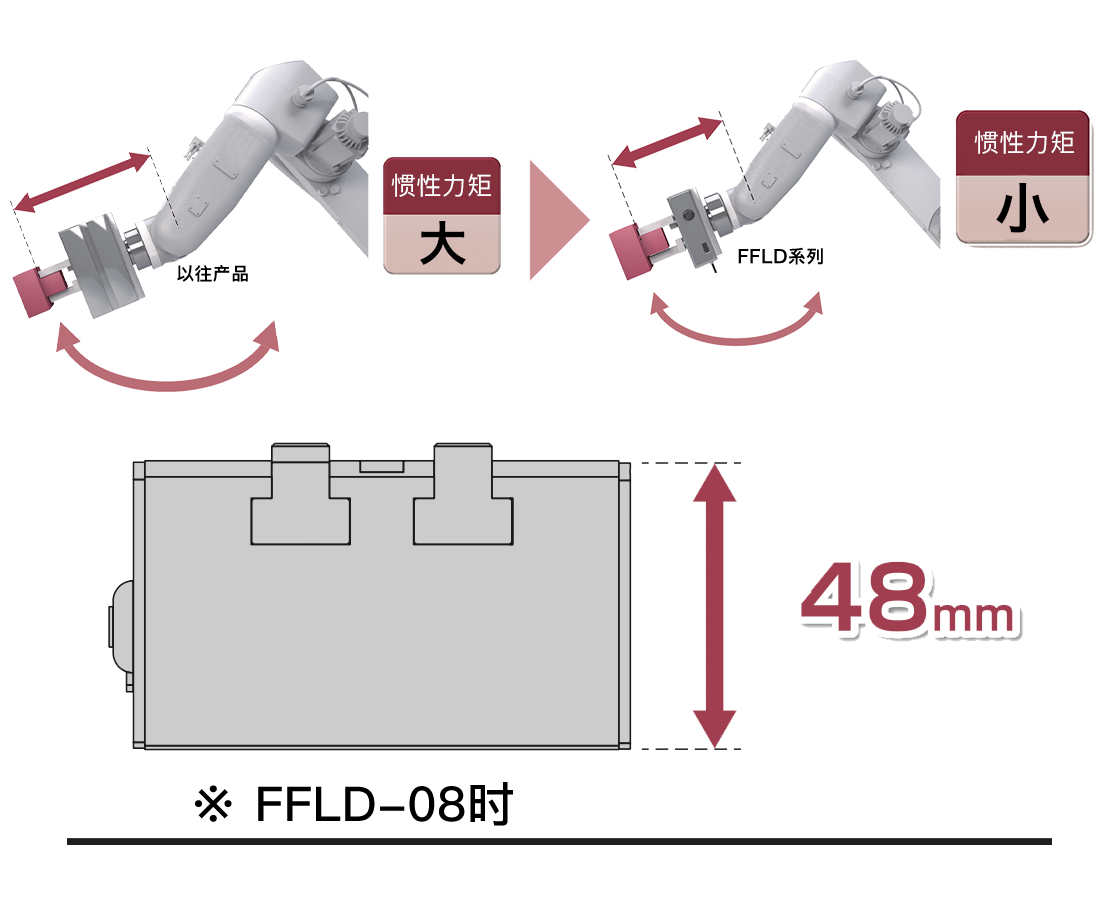
双卡爪夹持型FFLD系列,采用业界顶级的薄型设计,可降低惯性力矩,有助于促进机器人的小型化。
控制器内置执行器,动力、控制的电缆1根即可完成连接,因此机器人前端也可降低断线的风险。
/ FFLD
考虑到装置空间和成本,采用小型机器人,因此在其前端所配备的电动卡爪也需要尽可能低惯性的卡爪。
双卡爪夹持型FFLD系列,采用业界顶级的薄型设计,可降低惯性力矩,有助于促进机器人的小型化。
控制器内置执行器,动力、控制的电缆1根即可完成连接,因此机器人前端也可降低断线的风险。